
Con tantas capacidades para evitar obstáculos, la única progresión natural para los drones sería que fueran controlados a mano. Para el inventor turco [metehanemlik], incluso esto no fue un desafío suficiente, ya que decidió crear un mini dron con ESP8266: ESPcopter, un dron modular programable compatible con Arduino que está abierto a modificaciones a través de shields de expansión. Los entusiastas del DIY no solo pueden modificar los algoritmos utilizados para evitar obstáculos, sino que el dron puede dimensionarse según las dimensiones que se ajusten a sus necesidades.
El dron está construido casi en su totalidad a partir de shields de expansión, incluido el shield multi-rango con cuatro sensores VL53L0x de alcance láser en las direcciones hacia adelante, hacia atrás, derecha e izquierda del dron. El sitio web de ESPcopter viene con un SDK que permite a los usuarios modificar fácilmente el software que se ejecuta en el MCU del dron, así como pinouts para comprender mejor su funcionalidad de hardware. Impresionantemente, se financió por completo a través de una campaña de crowdfunding de 60 días, y se someterá a un segundo lanzamiento en breve, con algunas características nuevas y mejoradas.

La energía proviene de una batería LiPo de 260 mAh que permite hasta seis minutos de tiempo de vuelo; incluye un giroscopio de 3 ejes, acelerómetro y magnetómetro; se ejecuta en una MCU ESP8266-12S de 32 bits; se carga completamente en 45 minutos a través de una conexión USB; pesa alrededor de 35 g; y mide aproximadamente 90 mm de motor a motor.
El software incluye una librería ESPcopter compatible con el IDE Arduino, que incluye un software de control de vuelo para estabilizar el vuelo del dron. También hay ejemplos de cómo construir un servidor web autónomo para permitir al usuario controlar el dron desde un teléfono, tableta o computadora portátil. Desde la pantalla de control del dispositivo remoto, los usuarios pueden controlar cabeceo, alabeo, guiñada y aceleración utilizando joysticks de control, al tiempo que modelan el vuelo en una simulación de ruta.
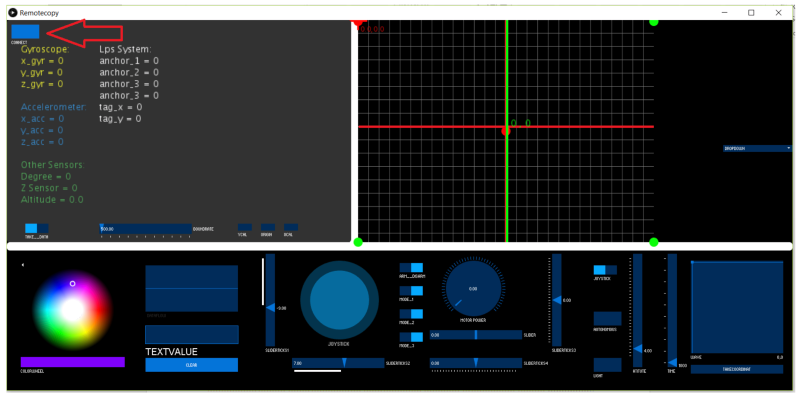
Usando el SDK, los usuarios pueden implementar un filtro mediano, un filtro complementario y algoritmos PID, permitiéndoles efectivamente una gama completa de posibilidades en la funcionalidad de su dron.
¿La parte más útil del proyecto ESPcopter? Ya existe una motivada comunidad en línea llena de makers de todo el mundo que hablan sobre diferentes proyectos que van desde configuraciones de cámara de visión en primera persona (FPV), programación de enjambres de drones e incluso la creación de colaboraciones de video educativo.
Fuente: Hackaday