Hace unos meses, un maker español llamado Jordi Torrent nos compartió su robot Andromina, al cual se le podían adaptar pinzas robóticas, sin embargo, Jordi se percató de que no hay gran variedad de pinzas en el mercado y eso lo motivó a realizar un nuevo proyecto: Andromina Gripper.
En hacedores.com publicamos y difundimos aquellos proyectos realizados por gente como tú. Andromina Gripper no sería la excepción, a continuación Jordi nos da más detalles de su creación.
¿Qué hace tu proyecto y cómo se llama?
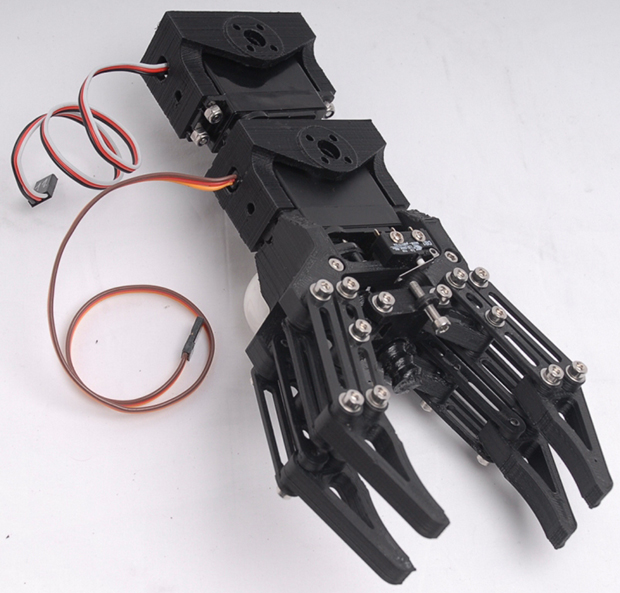
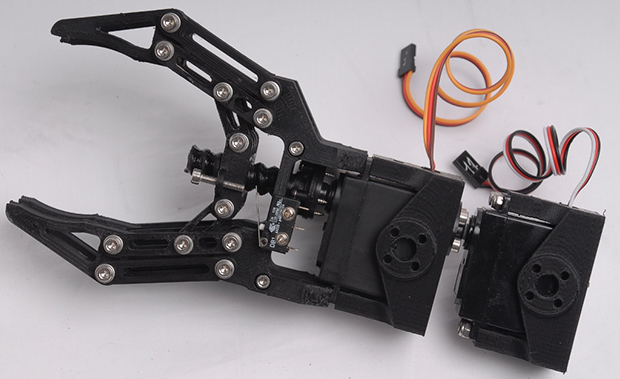
He diseñado y fabricado unas nuevas pinzas robóticas para los “makers” y para los estudiantes que deseen desarrollar cualquier tipo de robot que necesite manipular objetos. El proyecto se llama “Andromina gripper”.
He añadido varias mejoras al diseño de estas nuevas pinzas. Tales como:
- Facilidad de conexión con todas las placas Arduino, Raspberry Pi etc… Podemos conectar las pinzas directamente a la placa, sin necesidad de ninguna “shield”.
- Las pinzas esta accionadas por dos servo motores estándares de RC. Uno que rota de 0 a 180º y el otro servo de rotación continua, 360 grados y con alimentación de entre 5 y 6 voltios.
- Las pinzas tienen dos grados de libertad. Uno que permite el cierre y apertura de las mordazas y el otro grado de libertad permite la rotación de la pinza.
- Las pinzas son robustas y ligeras.
- Pueden manipular objetos de hasta una medida de 78mm.
- La pinza dispone de un interruptor final de carrera, el cual nos puede servir para indicar que la pinza se ha cerrado completamente.
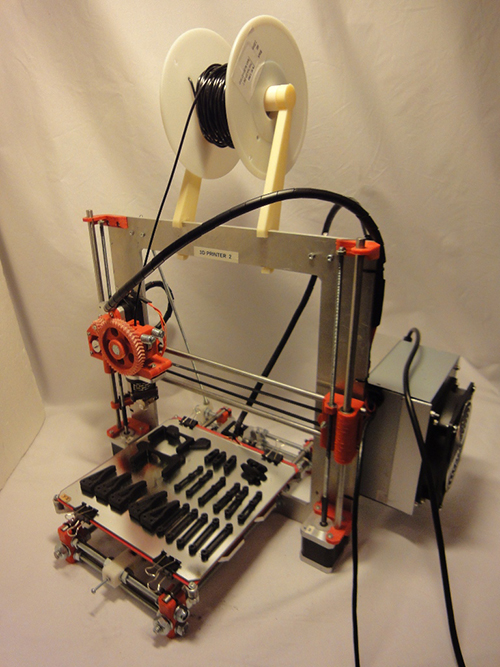
- Están fabricadas con una impresora 3D a base de plástico ABS. Y ensambladas con tornillos Allen de M-3 de acero inoxidable.
¿Quién es el autor del proyecto (es individual, colectivo)?
Es un proyecto totalmente individual, realizado por mi.
¿Por qué lo hiciste?
Mi motivación para la realización de este proyecto fue; Cuando estaba desarrollando mi robot Andromina y quise comprar una pinza robótica, vi que no había gran variedad de pinzas en el mercado. Casi todos los “makers” usan los dos mismos modelos. Por esta razón decidí diseñar mis propias pinzas robóticas.
De momento he diseñado dos modelos; una con dos mordazas y otra con cuatro. Pero estoy pensado en hacer otra pinza de 6 mordazas y quizás dos más de 3 y de 5 mordazas.
Otra motivación que tenía, era que en aquel momento acababa de montar una impresora 3D y quería ver si podía crear alguna parte de robot en 3D.
¿Cuánto tiempo llevó hacerlo?
Me llevó unos 4 meses. Me llevó bastante tiempo la fase de diseño y aún más la fase de pruebas que hice. Ya que realicé varios rediseños y mejoras de las pinzas hasta encontrar la óptima. La impresoras 3D son muy útiles para hacer rediseños rápidamente. Te permite hacer varias versiones e ir probando la mejor.
¿Cuánto dinero te costó hacerlo?
Yo estimo que unos 200 Euros. Pero lo más costoso fueron las horas que me pasé con el desarrollo del proyecto.
¿Tenías experiencia previa en el tema antes de hacer tu proyecto?
Sí, tengo una larga experiencia en el diseño mecánico de máquinas. Soy ingeniero mecánico.
¿Cómo calificas su nivel de dificultad?
Yo lo considero un nivel de dificultad bajo.
A continuación algunas fotografías y video de su pinza robótica en acción.

Post relacionados
 Idea Builder: Una impresora 3D hecha por Dremel para el mercado masivo
Idea Builder: Una impresora 3D hecha por Dremel para el mercado masivo
 Canguro biónico de Festo
Canguro biónico de Festo
 Innovatech: Innovación, Tecnología y Educación en un mismo espacio
Innovatech: Innovación, Tecnología y Educación en un mismo espacio
 2014 el año de las impresoras 3D
2014 el año de las impresoras 3D
 Discurso de Barack Obama sobre la nueva revolución industrial, impreso en 3D
Discurso de Barack Obama sobre la nueva revolución industrial, impreso en 3D
 Angad Daryani, un joven maker que ha triunfado en la India
Angad Daryani, un joven maker que ha triunfado en la India
 Nuevo proyecto que apunta hacia un corazón impreso 3D dentro de una década
Nuevo proyecto que apunta hacia un corazón impreso 3D dentro de una década
 Software de Disney que calcula las piezas necesarias para un autómata
Software de Disney que calcula las piezas necesarias para un autómata
No Comments