Mucho se ha hablado sobre las aplicaciones de los multicópteros, pero ¿realmente conoces cómo está hecho uno? A continuación conocerás la estructura básica y los componentes que lleva un vehículo aéreo no tripulado (UAV).

Ilustración de Rob Nance. Imagen tomada de: http://makezine.com/magazine/make-37/anatomy-of-a-drone/
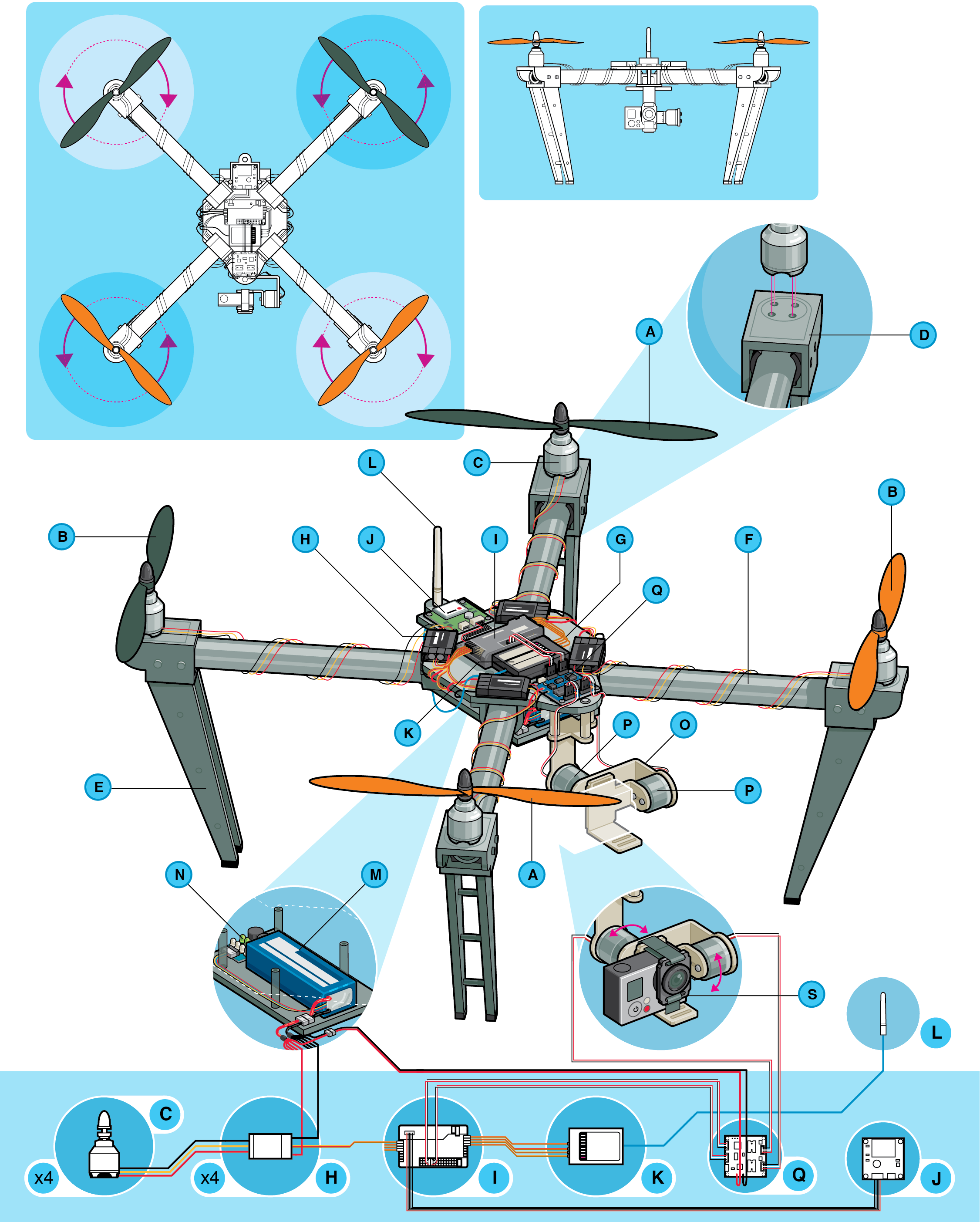
A. HÉLICE ESTÁNDAR
La misma hélice que se utiliza en los aviones R/C estándar con motor delantero.
B. HÉLICE “IMPULSORA” (PUSHER)
Estas hélices de rotación contraria anulan exactamente el torque del motor durante el vuelo a nivel estacionario.
C. MOTOR
Por lo general, es del tipo sin escobillas (brushless) eléctrico, que es más eficiente, más confiable y más silencioso que un motor con escobillas.
D. MONTURA PARA EL MOTOR
A veces incorporada en los accesorios de combinación con las puntales de aterrizaje.
E. TREN DE ATERRIZAJE
Los diseños que necesitan gran separación del suelo pueden adoptar patines estilo helicóptero, montados directamente en el cuerpo, mientras que los diseños que no tienen carga colgante pueden omitir el tren de aterrizaje completo.
F. BRAZO
Brazos más cortos incrementan la maniobrabilidad, mientras que los más largos aumentan la estabilidad. Éstos deben ser resistentes para soportar un choque.
G. CUERPO PRINCIPAL
Cuerpo central desde donde salen los brazos como los rayos de una rueda. Aquí se colocan las baterías, la aviónica, cámaras y sensores.
H. CONTROLADOR ELECTRÓNICO DE VELOCIDAD (ESC)
Convierte la alimentación DC (corriente directa) de la batería, en CA (corriente alterna) trifásica para manejar los motores sin escobillas.
I. CONTROLADOR DE VUELO
Interpreta la entrada del receptor, módulo GPS, monitor de la batería y los sensores a bordo. Regula la velocidad de los motores, a través de los ESC, para proporcionar la dirección, así como el disparo de las cámaras u otras cargas útiles. Controla el piloto automático y otras funciones autónomas.
J. MÓDULO GPS
A menudo se combina el receptor GPS y un magnetómetro para proporcionar la latitud, longitud, elevación y dirección de la brújula desde un único dispositivo.
K. RECEPTOR
A menudo, una unidad receptora de radio estándar R/C. El número mínimo de canales necesarios para controlar un quad es 4, pero por lo general se recomiendan 5.
L. ANTENA
Dependiendo de tu receptor, puede ser una wire whip o una helicoidal tipo “rubber ducky”.
M. BATERÍA
Las baterías de polímero de litio (Li-Po) ofrecen la mejor combinación de densidad de energía, densidad de potencia, y vida útil en el mercado.
N. MONITOR DE BATERÍA
Proporciona, durante el vuelo, el monitoreo del nivel de energía al controlador de vuelo.
O. GIMBAL
Montura estabilizadora que gira alrededor de 1, 2, o 3 ejes para proporcionar estabilización y dirección a las cámaras u otros sensores.
P. MOTOR DEL GIMBAL
Se pueden usar motores brushless de corriente directa para controlar directamente la colocación angular, además de que requieren bobinas especialmente enrolladas y circuitería de control dedicada que, recientemente, se han hecho disponibles comercialmente.
Q. CONTROLADOR GIMBAL
Permite controlar los motores brushless de accionamiento directo del gimbal como si fueran servos estándar.
R. CÁMARA
GoPro u otra unidad compacta de video HD con almacenamiento integrado. El streaming en tiempo real es posible con un equipo especial.
Fuente: Makezine
Post relacionados
 El primer cuadricóptero de ¡chocolate!
El primer cuadricóptero de ¡chocolate!
 Cuadricóptero hecho con una pluma de impresión 3D
Cuadricóptero hecho con una pluma de impresión 3D
 Drones en la Ciudad, un evento de UAVs sin precedentes en México
Drones en la Ciudad, un evento de UAVs sin precedentes en México
 El drone que cambiará el graffiti
El drone que cambiará el graffiti
 Cuadricóptero autónomo que cabe en la palma de tu mano
Cuadricóptero autónomo que cabe en la palma de tu mano
 Haz un avión solar
Haz un avión solar
 Cuadricópteros que pueden volar invertidos si se revierten sus motores.
Cuadricópteros que pueden volar invertidos si se revierten sus motores.
 Ornitóptero impreso en 3D impulsado por una banda elástica
Ornitóptero impreso en 3D impulsado por una banda elástica
5 Comments
El JAAL
08/Ago/2014 at 11:31 pmCual es la diferencia entre las hélices etiquetadas con A y B si son del mismo diseño y del mismo fabricante, a que se refieren con hélice estándar y hélice impulsora, si cuando compras el paquete de hélices para un drone las cuatro son exactamente iguales…. Gracias!!!!!
cgalicia
10/Ago/2014 at 9:17 pmLa única diferencia es que giran en sentido contrario. Es importante mencionar eso, ya que si las 4 giraran hacia el mismo sentido, el multicóptero volaría dando vueltas en su propio eje.
Saludos
cgalicia
10/Ago/2014 at 9:17 pmLa única diferencia es que giran en sentido contrario. Es importante mencionar eso, ya que si las 4 giraran hacia el mismo sentido, el multicóptero volaría dando vueltas en su propio eje.
Saludos
cgalicia
10/Ago/2014 at 9:17 pmLa única diferencia es que giran en sentido contrario. Es importante mencionar eso, ya que si las 4 giraran hacia el mismo sentido, el multicóptero volaría dando vueltas en su propio eje.
Saludos
Luis Ñañez
09/Jun/2015 at 11:21 ambuenas tengo una duda,como proyecto personal quiero hacer un drom y tengo una duda en el control de los motores lo puedo hacer con un solo variador esc, osea teniendo un arduino y un variador esc pueso controlar los 4 ocada motor debe de tener un variador?. gracias 🙂